Pixhawk 2 Cube Orange와 Companion Board(Raspberry Pi 4) 연결하기 2- Raspberry Pi 4 하드웨어 구성
이전 포스팅에서 이어집니다.
Pixhawk 2 Cube Orange와 Companion Board(Raspberry Pi 4) 연결하기 1 - Raspberry Pi 4 환경 구성
라즈베리파이에 Ubuntu 20.04 설치 이 내용은 참고 자료가 너무 많아 자세히는 다루지 않고, 링크 첨부로 대신합니다. https://linuxhint.com/install-ubuntu-desktop-20-04-lts-on-raspberry-pi-4/ Install Ubuntu Desktop 20.04 L
mkdrone.tistory.com
UART 연결 구성
두 컴퓨터 간의 연결에는 USB TTL 모듈을 사용했습니다. 라즈베리 파이의 GPIO에 연결하는 방법도 있지만, Baud Rate가 제한되어 있기도 하고, 간편하게 USB 형태의 모듈을 사용할 수 있는 장점이 있어 TTL 모듈을 사용합니다.
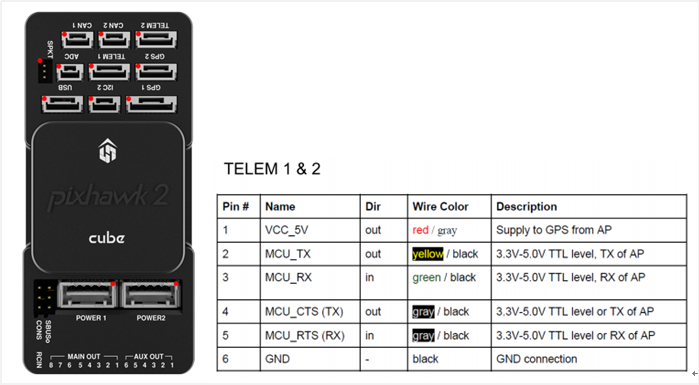
픽스호크에서 여분으로 제공하는 6핀짜리 커넥터를 잘라서 USB-TTL 모듈에 납땜해 주었습니다. 위 핀맵을 참고하여, GND끼리 연결하고, (MCU_TX와 TTL의 RX), (MCU_RX와 TTL의 TX)를 연결하여 총 3개의 선을 납땜하면 됩니다. 별도 전원은 넣어주지 않아도 됩니다.

Telem 1 와 Telem 2 중 텔레메트리를 사용하지 않는 포트에 본 TTL 모듈을 연결합니다. 본 포스팅에서는 Telem2 포트를 사용하겠습니다. 아래의 매개변수들을 변경합니다.


Telem2 포트를 사용하므로 SERIAL2 관련 매개변수들을 변경한 것입니다. 만약 Telem1 포트에 TTL 모듈을 연결한다면, SERIAL1_PROTOCOL, SERIAL1_BAUD 매개변수들을 변경해야 합니다.
전원부 구성
라즈베리파이에 전원을 공급합니다. 별도 USB 케이블을 이용하지 않고, GPIO에 직접 전원을 인가하는 방식을 사용하였습니다.
5V 3A의 전원을 공급할 수 있는 레귤레이터에 점퍼 Female 케이블을 납땜하여 사용합니다. 점퍼의 경우 속의 선이 매우 얇아 피복을 길게 벗겨 여러번 꼬아 납땜하였습니다.
아래 사진에서 초록색으로 표시한 부분이 전압 레귤레이터(BEC)입니다.
이후 라즈베리파이 GPIO 핀에서 VCC와 GND에 해당하는 핀들에 각각 연결해줍니다. 이러한 방식이 위험하다는 글도 있었는데 수차례 비행에서 딱히 위험한 상황은 발생하지 않았습니다.


위 그림에서, 2번 핀(또는 4번 핀, 5V in)과 6번 핀(gnd)에 각각 + - 케이블을 연결해 주시면 됩니다.

위 그림과 같이, 배터리에서
- PDB - ESC - Motor
- FC Power Module - FC
- BEC - Raspberry Pi
로 각각 전원이 분배됩니다.
위 과정까지 수행하면 라즈베리파이를 드론에 장착할 수 있는 하드웨어 구성이 완료됩니다.
이번 포스팅은 여기까지이며, 궁금하시거나 잘못된 부분이 있으면 댓글 주시면 감사하겠습니다.